Definition: Remote Terminal Unit (RTU) in SCADA systems is a microprocessor-based electronic device present at geographically distributed remote locations in order to facilitate communication of various devices within the distributed SCADA system. It consists of input-output hardware and communication interface for remote sensing and controlling of ongoing processes.
The sole purpose of an RTU present at the remote site of the SCADA system is to send all the collected data and information to the central station with the help of sensors, monitors, production processes, etc. so that it can be stored and monitored.
The remote terminal unit is sometimes known as the remote telemetry unit or remote telecontrol unit.
Basics of Remote Terminal Unit
We have discussed in the previous content of the introduction to SCADA systems that SCADA systems permit the interconnection of various units which are dispersedly present at various remote locations to handle industrial control processes.
The remote terminal unit acts as a crucial component of SCADA systems. It establishes and maintains the connection between the different elements of the system to facilitate communication where a wired connection cannot be established. As it supports the communication of remote field equipment thus it is named so.
- It is to be noted here that PLCs that hold the ability to communicate through radio waves can act as a substitute for RTUs.
Evolution of RTU
In the initial phases, even before the arrival of the SCADA system, RTUs were used for remote telemetry purposes with integration to the central computer.
So, at that time, RTUs were hardwired devices that were electronically designed for fixed functions such as responding to the serially received numeric codes. So, the early remote terminal units were functioned to read and transmit the current input and status values and to generate contact outputs according to the control message.
But at that time, the developed systems only supported accurate monitoring and not fulfilled the purpose of effective controlling. However, further innovations in that field made possible the conveying of change of status of a process to remote monitoring station as well as printing it with reported date and time.
Further, with the advent of microprocessor-based technology, the manufacturers incorporated the microprocessor and microcomputer logic within the RTUs. And this further enhanced the flexibility of industrial control systems by providing better operational characteristics and performance.
The reason behind this was that microprocessor chips offered fast computing features and reduced the overall cost, this improvised the performance of the system.
RTU Architecture
The figure here shows the architectural representation of the Remote Terminal Unit:
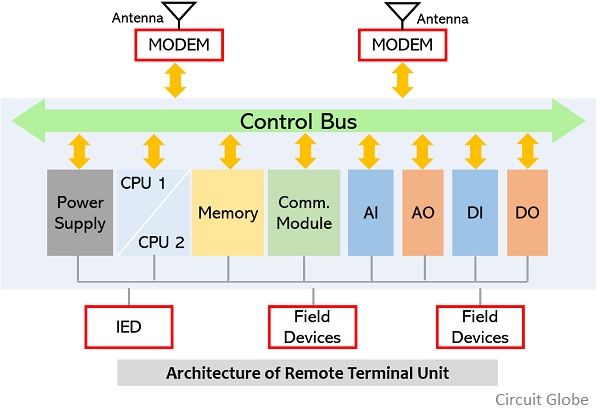
The major components of RTU are CPU, Memory (volatile and non-volatile), Power supply module with battery, Real-time clock, Watchdog Timer, Communication Interface (serial port or onboard modem with I/O interface).
In the above-shown figure, a hardware module is shown where the I/O modules are placed within the RTU panel and communication is established with the master station via the communication port. The I/O modules are connected to the central processor in order to communicate with the master station.
Let us now understand each unit separately:
CPU
The inbuilt central processing unit nowadays uses 16-bit or 32-bits microprocessor with the memory capacity of 256 kilobytes. It consists of 3 communication ports with ethernet links and the real-time clock is used for the overall controlling of the system.
The use of watchdog timer provides real-time checking of regular execution of processes. This watchdog timer gets reset on regular basis and in case the resetting is delayed then the timer flags error.
As it is clear from the figure that dual CPUs are incorporated here with dual power supply. And among the two CPUs, one serves the purpose of primary and other as standby. So, in case the primary one fails, the system is automatically triggered to the standby CPU.
Power Supply Module
For the uninterrupted operation, continuous supply of power is required by the RTU, but the unit is separated with a large distance from the point where supply is actually present. So, to facilitate uninterrupted operation in case of power failure, an alternate power source with battery backup is provided to the unit. For low power RTUs, solar panels are mostly used while sometimes thermoelectric generators are used according to the availability of gas pipelines.
Generally, lead-acid or nickel-cadmium batteries are used.
The typically expected value for operation is around 110/40 V AC ± 10% with a frequency of operation 50 Hz or 11/14/48 V DC ± 10%.
Analog Input Module
The applied analog input is generally a variable voltage or current, varying in direct proportion to the process under measurement. The different analog inputs are 0-1 mA, 0-10 V, ± 1.5 V, 5 V, etc.
The analog inputs must specifically include a multiplexer, signal conditioner, sample and hold circuit, ADC and bus interface. The features of analog input modules are:
- There are 8, 16 or 32 analog inputs,
- It usually offers 8 to 12 bits of resolution,
- Generally, 4 to 10 mA range,
- The input resistance for the input module is 140 Kilo ohms to 1 Mega ohm,
- The offered conversion rate is about 10 microseconds to 30 milliseconds.
Analog Output Module
These are used to deal with variable quantities such as graphic recording instruments or strip charts. It basically transforms the digital value received from the CPU into analog form using DAC. Further, this analog representation controls the actuators.
The basic features of analog output modules are:
- It has 8, 16, 32 analog outputs,
- It offers a resolution of 8 or 12 bits,
- The provided conversion rate is between 10 microseconds to 30 milliseconds,
- The output ranges between 4-10 milliampere or 0 to 10 V.
Status Inputs
These represent status or alarm signals for the ongoing process. Generally, remote terminal units hold input status card that has two state real-world information.
It has isolated voltage or current source that is used to have a check-on over the position of remote contact (i.e., whether it is open or closed) at the RTU site. Depending on the contact position the status of various devices like electrical breakers, alarm conditions, etc. can be determined.
Digital Output Module
The digital output module of the RTU usually drives the output voltage at each respective output channel such as high current capacity relays so as to switch the power on and off.
The approaches used for driving are as follows:
- Triac Switching,
- Read Relay Switching,
- TTL voltage outputs.
Communication Interfaces
A remote terminal unit can be interfaced to multiple control stations and intelligent electronic devices using different communication media like RS485, RS232, ethernet, microwave and satellite, etc. When a communication interface is maintained between two ends then either side can initiate the data transfer so as to have synchronized data transfer with the least possible traffic issues.
Also, if the multiple RTUs within the SCADA system wants to share a common communication line then using multi-drop scheme this can be done. As unique addressing is provided to each unit and response will be understood depending on their polls and commands.
A noteworthy point over here is that the design of remote terminal units in today’s world depends on the pre-decided standards by International Electro and Technical Commission, American National Standard Institute, Institute of Electrical and Electronics Engineer. In the architecture, there is supportability towards pluggable modules.
Sonia says
Thanks, this is helpful.